Un servomoteur est un matériel couramment utilisé en modélisme. C’est également un élément que l’on peut facilement utiliser en programmation, pour peu que le microcontrôleur, soit capable de générer des signaux PWM.
Le module MCU (comme un Arduino Uno ou Nano) est capable de générer des signaux PWM sur 6 broches digitales (3, 5, 6, 9, 10 et 11).
Sur le module MCU, un ensemble de connecteurs permet de connecter directement jusque 6 servomoteurs. Les connecteurs destinés aux servomoteurs sont placés à gauche du module placé en exemple ci-dessous.
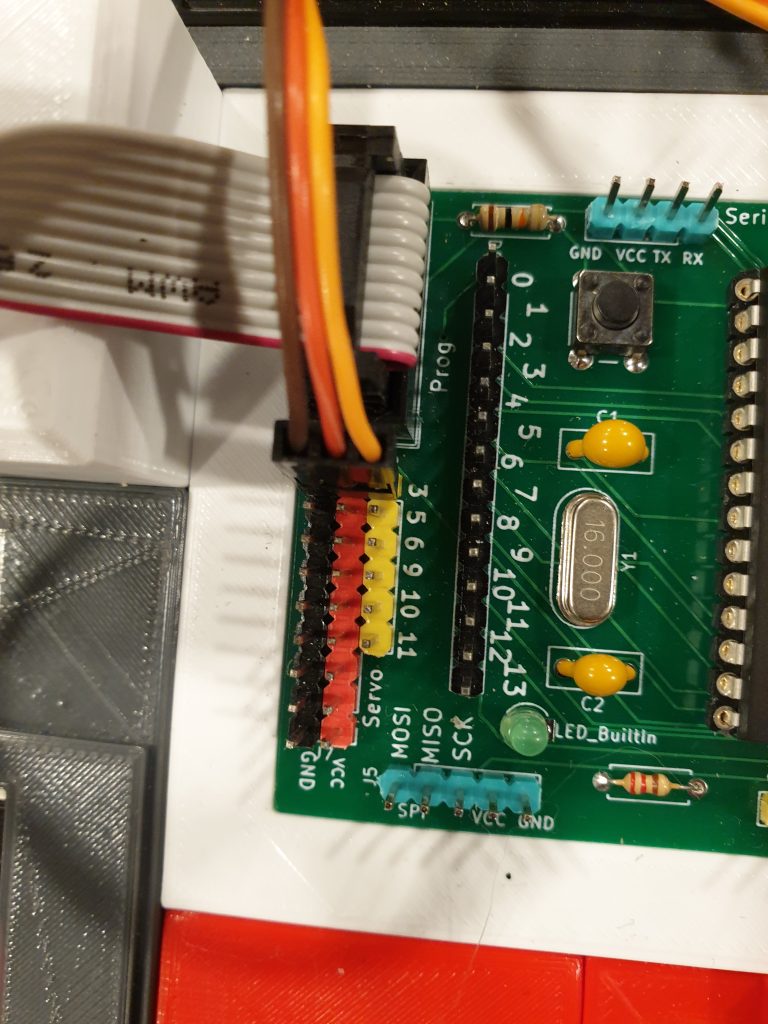
La connexion du servomoteur se fait simplement, le fil de couleur foncée (noir ou marron en général) est à brancher sur la masse (barre noire placée à gauche sur cette photo).
Le numéro placé à coté des connecteurs correspond à la broche digitale qui génère le signal. Dans cet exemple, le servomoteur est également connecté sur la broche digitale 3. Ce numéro est à utiliser dans le code du programme pour différencier chaque servomoteur raccordé.
A noter que comme la broche jaune de chaque servomoteur est également raccordée à une broche digitale, il ne faut pas raccorder la même broche digitale à un autre module. Dans cet exemple la broche digitale 3 ne doit pas être utilisée.